| 專利名稱 | 一種自取能管道內壁清洗機器人 | ||
|---|---|---|---|
| 申請號/專利號 | CN201711376084.9 | 專利權人(第一權利人) | 長春理工大學 |
| 申請日 | 2017-12-19 | 授權日 | 2020-07-07 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 高端裝備制造 |
| 技術主題 | 齒輪|機器人|凸輪|冠狀齒輪|物理學 | ||
| 應用領域 | 清潔空心物品 | ||
| 意向價格 | 具體面議 | ||
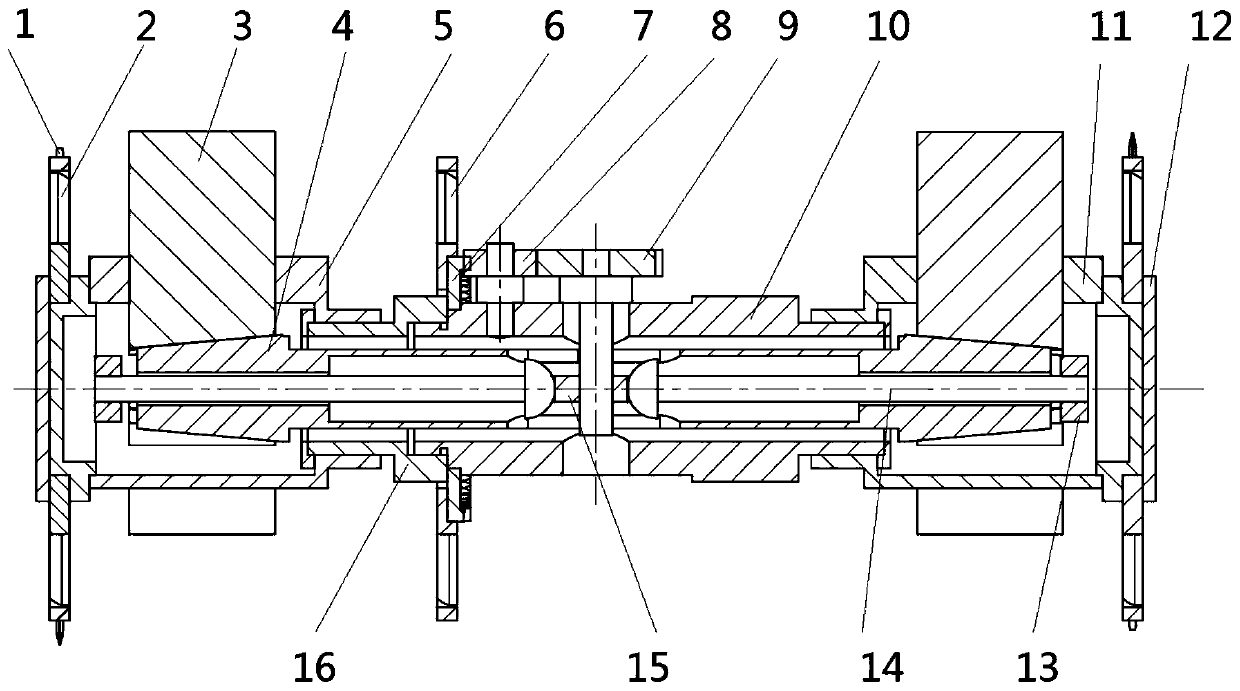
| 專利概述 | 一種自取能管道內壁清洗機器人涉及機器人領域,該機器人包括:兩個清洗盤、支撐腳、內軸、驅動盤、冠齒輪、齒輪副、軸套、兩個磁鐵、兩個推桿和凸輪;兩個清洗盤分別設置在支撐套的兩端;內軸安裝在支撐套的內部;位于支撐套外端,兩個清洗盤內,圓周均布多個支撐腳,通過軸套與內軸相配合,內軸與支撐腳配合的面為斜面,且內軸兩端斜面的斜率互補;在軸套上設置一個驅動盤和與驅動盤同軸固定的冠齒輪,與冠齒輪配合運動的是一個齒輪副,齒輪副的軸與設置在內軸內的凸輪固聯;凸輪兩端設有與之相互配合運動的推桿,每個推桿的末端固定一個磁鐵;該機器人解決了現今內壁清洗機器人結構復雜,成本高,工作效率低,清洗不徹底等問題。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬許可 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |