| 專利名稱 | 一種輪足混合行走機器人結構及控制系統 | ||
|---|---|---|---|
| 申請號/專利號 | CN202011276655.3 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2020-11-16 | 授權日 | 2023-03-31 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 高端裝備制造 |
| 技術主題 | 控制系統|腿式機器人|驅動輪|仿真|六自由度 | ||
| 應用領域 | 機動車 | ||
| 意向價格 | 具體面議 | ||
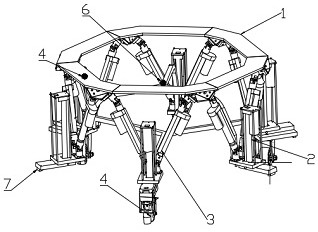
| 專利概述 | 本發明提供一種輪足混合行走機器人結構及控制系統,采用了六自由度并聯腿與輔助腿結構、聯結于腿上的驅動輪結合,結合了足式機器人可以在復雜地形能完成大負荷,高強度的作業(如搬運等),輪式機器人在平滑路徑也能高效實時響應的優點,能在各種地形下完成輪式直行、轉彎、橫移等動作,既體現最基本的步行運動、自由度較少的特點,又增強了在結構化、非結構化環境中行走的能力。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬轉讓 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |